
Presentations and Posters
Here, you can find the presentations and posters presented during the mid-term event.
The video recordings of the event can be found >>here.
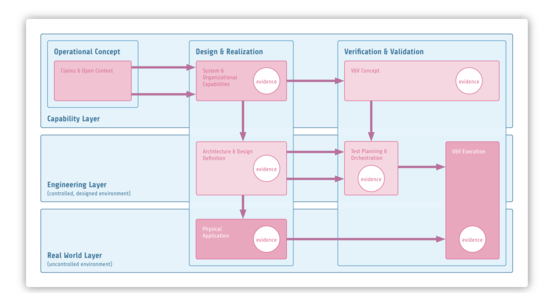
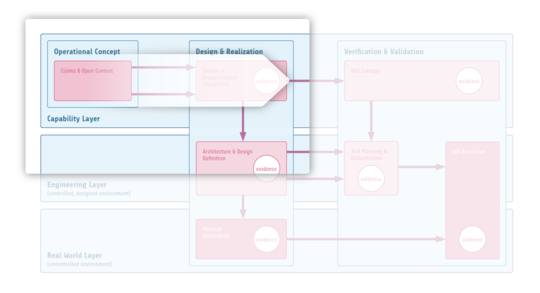
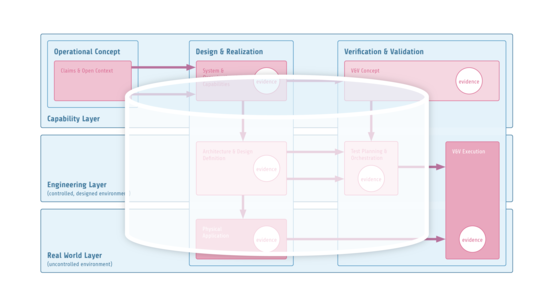
Overall Approach
Presentations
From PEGASUS to VVM - Where do we come from and why the PEGASUS Journey has not yet reached its Final Destination
Ulrich Eberle (Stellantis)
VVM Main Approach - How to Systematically Release AD Systems
Roland Galbas (Bosch)
VVM Assurance Argumentation - How to Systematically Organize the Approval Concerns for Safe AD Systems in a Structured Framework
Jan Reich (Fraunhofer), Marcus Nolte (TU Braunschweig)
VVM Safeguarding Automation - How to Ensure a Safe Operation of an Automated Driving System by a Methodological Approach - An interims report
Helmut Schittenhelm (Mercedes-Benz)
Requirements
Presentations
How to Derive Top Goals Systematically
Tino Brade (Bosch)
Criticality Analysis for the Verification & Validation Automated Driving Systems
Christian Neurohr (DLR)
Ontologies for the Formalization, Recognition, and Analysis of Criticality
Lukas Westhofen (DLR)
Criticality Metrics: Introduction and their Use in Practice
Martin Bollmann (ZF)
How to Specify Behavior of Automated Vehicles in Accordance with Traffic Rules and Regulations - A Contribution
Frank Junker (Bosch)
Contributions to a Traceable Behavior Specification for Automated Driving Systems Using Formal Methods
Hans Nikolaus Beck (Bosch), Nayel Fabian Salem (TU Braunschweig)
Capability-based Architecture for Automated Vehicles in Urban Environment
Tamara Hofmann (PROSTEP)
Posters
From OD over ODD to FUC and Scenarios
Functional Use Cases: Characteristic Scenarios for the Evaluation of Urban Driving Automation
Challenges in Generating an Item Definition for an Automated Driving System (ADS)
Identification and Analysis of Criticality Phenomena within the GIDAS Database
Structuring the Scenario Space using Abstract Scenarios
Evasion Threat Metrics (ETM): A Contribution to the Criticality Assessment
Modeling and Analysis of Causal Relations
Identifying hazards using a maneuver-based behavior description
Digital Dependability identities – a Concept to manage Complexity
PSM Formalization - computable rules
Verification & Validation
Presentations
Structure of Verification and Validation
Jürgen Nuffer (Fraunhofer)
An Approach for Decomposition and Analysis
Julian Pott (Ford), Matthias Rauschenbach (Fraunhofer)
A Story of Scenarios - From Data and Knowledge to Scenarios for Testing
Andreas Bussler (Volkswagen), Nicolas Wagener (RWTH Aachen)
Technical Test Orchestration – Deriving Technical Test Specifications and Ensuring Test Automation
Martin Doerr (ZF), Slavisa Krebs-Radic (ZF)
Test Technologies and Infrastructure for Verification and Validation of AD Systems
Christian King (FZI), Jonathan Millitzer (Fraunhofer)
Validation of Test Infrastructure - From Cause Trees to a Validated System Simulation
Gerhard Schunk (Valeo), Philipp Rosenberger (TU Darmstadt)
Posters
From Capabilities to System Elements
Insights into the Testinstance Vehicle-in-the-Loop
Scenario Concepts to derive Scenarios from Data for the Test
Validation of Test Infrastructure I: From Cause Trees to a Valid System Simulation
Validation of Test Infrastructure II: Software in the Loop Sensor Simulation Environment
Validation of Test Infrastructure III: Perception tests on a Cobot HiL
Learning-Driven Product Lifecycle & In-Service Monitoring and Reporting System
Scenario-based testing at scale I
Scenario-based testing at scale II
Component Testing with Mechanical Hardware-in-the-loop
Empirical Validation of Simulation Results
Extraction and Resimulation of Scenarios from the Test Area (TAF BW) in Karlsruhe
Seamless Testing of Urban Scenarios in the Simulation and on the Proving Ground
Adverse Weather Validation for Automated Driving Systems (ADS)
Method for Risk-based Selection of Relevant and Representative Test Cases
A Method to Select Relevant Scenarios for a V&V-process
A Safety Analysis Method Regarding (In)Capabilities, Weaknesses and Component Failures
Scenario-based Testing with Modular Co-simulation of Open-source Tools
Data processes and tools
Presentations
Dataflow in the VVM Project
Nicolas Wagener (RWTH Aachen), Kevin Laubis (AVL)
The OMEGA Format – A Comprhensive Open-Source Measurement Data Format
Michael Schuldes (RWTH Aachen)
Derivation of Requirements for Data Collection
Christian Gutenkunst (AVL)
Deriving and Simulating Scenarios
Michael Schuldes (RWTH Aachen), Tuan Duong Quang (TÜV Süd)
Configurable Simulation Tools for Various V&V Tasks
Hardi Hungar (DLR)
Usage of Baselining and Traceability Demonstrator Developed in VVMethods
Christian Bühler (PROSTEP), Kim Steinkirchner (PROSTEP)
Posters
Context Aware Data Reduction for Highly Automated Driving
Virtual Assessment of Automation in Field Operation (VAAFO)
Details on the Attributes within Scenario Engine and Database
Scenario Extraction at an Urban Crossing
Data Capturing Vehicle - Designing the Reference Sensor System
International Perspectives
Presentations
Introduction to the International Session
Marcus Nolte (TU Braunschweig)
The SET Level project approaching the final sprint
Frank Köster (DLR), Germany
ODD based safety assurance for Automated Driving Systems - standards and tools
Siddartha Khastgir (WMG, University of Warwick), UK
A path to a European scenario database for ADAS and ADS specification and validation
Emmanuel Arnoux (Renault), France
Scenario selection and allocation based on databases
Xavier Sellart (IDIADA), Spain
Safety Assurance to Earn Public Trust - Formalizing the Safety Case for ADS (Autonomous Driving Systems)
Steven Shladover (University of California, Berkeley), US
Advancing on the development of a sustainable ecosystem for Autonomous Driving safety assurance in Japan
Jacobo Antona-Makoshi (JARI, SAKURA project), Japan
Challenges, solutions and industry practices of SOTIF for Autonomous Vehicles in China
Hong Wang (Tsinghua University), China